逻辑回归
对于逻辑回归而言,y 的取值不是 0 就是 1,所以 $h_θ(x)$ 可以写为
其中
梯度上升法求解逻辑回归
对于给定的逻辑回归函数,我们使用最小二乘法来推导出最大似然估计,假设:
$P(y=1|x;θ)=h_θ(x)$,代表对于给定的 θ,y 取值为 1 的概率。
$P(y=0|x;θ)=1-h_θ(x)$,代表对于给定的 θ,y 取值为 0 的概率。
以上两者可以合并为:
假设 m 个训练集是相互独立的,则似然估计为:
和之前一样,上式可以简化为:
$l(θ) = logL(θ)
= \sum_{m}^{i=1}{y^{(i)}}log{h(x^{(i)}) + {(1−y^{(i)})}log(1 − h(x^{(i)}))}$
那么,
如何去最大化似然函数呢,可以应用梯度上升法,因为我们要使 P 的取值足够大,也是就预测准确的概率最够大。
随机梯度上升的公式为:
下面来求$\Deltaθl(θ)$的取值:
附上手写的推导过程: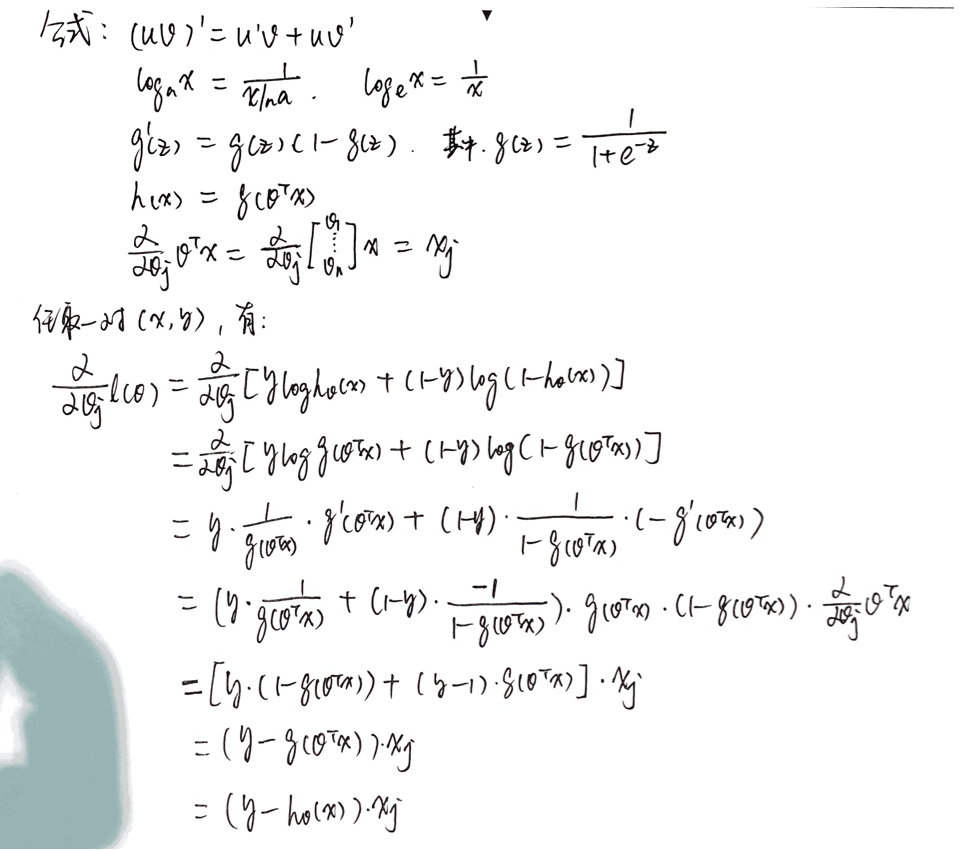
所以,最终随机梯度上升的公式为:
如何和线性回归的公式放在一起比较,
会发现,这两者非常相似,实际上却不然,因为这里的 $(h_θ(x^{(i)})$ 定义的不是线性函数。后续我们谈到 GLM 时会发现这并不是巧合,而是有更深层次的原因。
牛顿迭代法求解逻辑回归
牛顿迭代法可以利用到曲线本身的信息,比梯度下降法更容易收敛,即迭代更少次数。
牛顿迭代法简述
假设我们要求解方程 f(x)=0 的根,首先随便找一个初始值 x0,如果 x0 不是解,做一个经过 (x0,f(x0)) 这个点的切线,与 x 轴的交点为 x1。同样的道理,如果 x1 不是解,做一个经过 (x1,f(x1)) 这个点的切线,与 x 轴的交点为 x2。 以此类推。以这样的方式得到的 xi 会无限趋近于 f(x)=0 的解。
对于任意一点 $(x_n,y_n)$ 做切线,切线的斜率为 $f’(x_n)$,则有方程:
迭代过程
求解 $f(\theta)$ = 0 时 $\theta$ 的取值。
设下一次迭代时 $\theta^{(t+1)}$ 的取值与前一次迭代 $\theta^{(t)}$ 的取值(在 x 轴)距离为 $\Delta$。
则 $\theta^{(t+1)} = \theta^{(t)} - \Delta$,且 $\Delta = \frac{f(\theta^{(t)})}{f’(\theta^{(t)})}$,
所以有:
从泰勒展开到牛顿迭代
也可以由泰勒展开中推导牛顿迭代的公式。这次为了求解方程 f′=0 的根,把原函数 f(x) 的做泰勒展开,展开到二阶形式:
当且仅当 $\Delta x$ 逼近 0 时,上式成立,此时忽略 1/2 系数的作用,所以有:
故:
对函数求极大值的方法
>
- 将原函数y=f(x),对x求一次导数,得到dy/dx;
- 令dy/dx = 0,解得一次导函数的零点;
- 将原函数对x求二次导函数;
- 将解得的零点坐标的x值代入二次导函数,
如果是正值,零点所在位置,就是极小值点,再将该x值代入原函数,得到极小值;
如果是值值,零点所在位置,就是极大值点,再将该x值代入原函数,得到极大值;
如果是0,零点所在位置,既不是极小值点,也不是极大值点,是拐点。
所以求 $l(\theta)$ 在极大值处 $\theta$ 的取值,则是求 $l’(\theta) = 0$ 时 $\theta$ 的值,应用牛顿迭代法则有:
多维向量的牛顿迭代
对于多维向量 $\overrightarrow{X}$ 求解。
其中
$\nabla l(\theta)$ 是对 $l(\theta)$ 求导的值。
H 是一个 n*n 的矩阵,n 是特征数量,元素的计算公式为:
牛顿迭代法的特点
是否收敛
通常情况下是收敛的,但是需要满足一些条件,对于逻辑回归来讲,是收敛的。
迭代速度
每次迭代后,有解数字的误差是成平方倍减小的,是二次收敛函数。
优缺点
优点:收敛快
缺点:特征多(上千个)时,每次迭代成本大
Reference
http://blog.csdn.net/baimafujinji/article/details/51179381
http://blog.csdn.net/baimafujinji/article/details/51167852
如何通过牛顿方法解决Logistic回归问题